随着机器人技术的飞速发展,ROS(机器人操作系统)作为开源机器人软件平台的代表,在推动机器人智能化变革中扮演着至关重要的角色。从早期侧重于通信与基础控制,到如今深入智能感知、决策与执行的全栈式支持,ROS的演进路径清晰地指向一个核心目标:构建更智能、更灵活、更易部署的机器人系统。其中,数据处理与存储支持服务的强化,特别是从云端智能协同到本地高效执行的体系构建,成为加速这一变革的关键驱动力。
一、云端大脑:ROS驱动的智能化“中枢”
在机器人智能化体系中,“云端大脑”象征着强大的远程计算、深度学习模型训练与知识共享能力。ROS通过其灵活的通信机制(如话题、服务、动作)和丰富的工具链,为连接机器人本体与云端智能服务提供了天然桥梁。
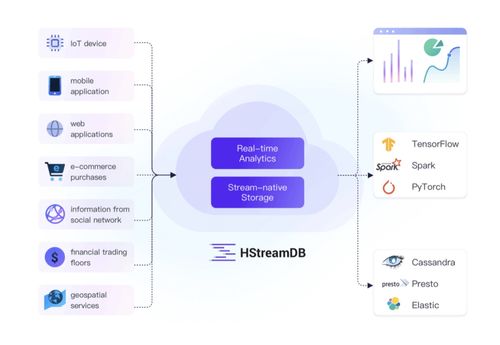
- 模型训练与知识库:云端可以利用海量数据进行模型训练(如物体识别、语义导航、行为预测等),生成高效的深度学习模型。ROS生态中的工具(如TensorFlow、PyTorch集成包)使得这些模型能够方便地封装为ROS节点或服务,供机器人调用。
- 复杂任务规划与仿真:在云端进行大规模环境模拟和复杂任务规划,通过ROS的Gazebo等仿真工具进行安全、高效的算法验证,再将优化后的策略下发至机器人。
- 数据聚合与群体智能:多机器人系统通过ROS将运行数据上传至云端,进行聚合分析,实现经验共享和协同策略优化,推动群体智能的涌现。
二、本地运动:ROS保障的实时“执行层”
尽管云端大脑提供了强大的智能,但机器人的最终价值体现在物理世界的实时、可靠执行上,尤其是运动控制。本地计算和实时性至关重要。
- 实时运动控制:ROS 2通过改进的实时性能和数据分发服务(DDS),显著加强了对实时运动控制(如关节轨迹控制、力控)的支持,满足了高动态响应需求。
- 传感器数据处理:激光雷达、摄像头、IMU等传感器产生的数据流巨大且要求低延迟处理。ROS提供了高效的数据传输机制(如Zero-Copy)和本地处理节点(如PCL点云库、OpenCV集成),确保感知数据能被快速解读并用于即时决策。
- 运动规划与执行:MoveIt!等基于ROS的运动规划框架,在本地结合环境感知与模型信息,实时计算机器人无碰撞运动路径,并驱动执行器完成动作。
三、数据处理与存储:ROS构建的“桥梁”与“仓库”
连接云端智能与本地执行的核心,是一套高效、分层的数据处理与存储支持服务体系。ROS生态正在此方面持续深化。
- 分层数据处理管道:ROS支持构建从原始数据采集、预处理(滤波、标定)、特征提取到高级语义理解的数据处理管道。节点间的松耦合特性允许灵活部署——计算密集型任务可放在边缘服务器或云端,而实时性要求高的处理则留在机器人本体。
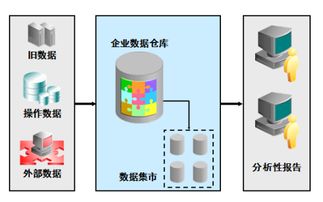
- 标准化数据格式与存储:ROS消息(msg)和服务(srv)定义了标准化的数据交换格式。而rosbag工具则提供了强大的数据记录与回放功能,成为算法开发、调试和测试不可或缺的“数据仓库”。结合数据库(如MongoDB的ROS接口)或时序数据库,可以实现结构化长期存储,便于数据分析和模型迭代。
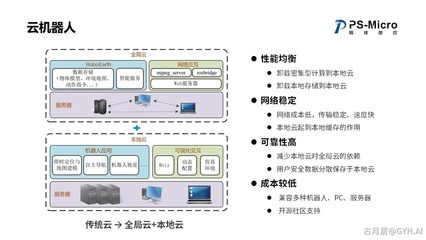
- 边缘计算支持:随着边缘计算兴起,ROS也适配于算力更强的边缘网关或车载计算机。这形成了一个“云端-边缘-本体”的三层架构,在边缘节点进行数据融合、轻量模型推理和临时存储,平衡了实时性、带宽消耗与智能水平。
四、展望:迈向更自主、协同的智能机器人
ROS将继续在以下方向演进,以进一步加速机器人智能化:
- 更强的本地智能:随着嵌入式AI芯片(如GPU、NPU)的普及,更多轻量化AI模型将直接部署于机器人本体,ROS需提供更优的硬件加速接口和推理框架集成。
- 更智能的数据生命周期管理:从数据采集、标注、存储、训练到部署的自动化流水线将更紧密地与ROS工具链结合,形成闭环。
- 安全与可靠性的深度融合:在数据通信、存储和处理各环节,安全性(如加密通信、安全存储)和可靠性(如数据完整性校验、故障恢复)将成为ROS核心设计的重要考量。
- 云-边-端无缝协同标准化:ROS有望在通信协议、数据格式和服务接口上,进一步推动云、边缘、机器人本体的协同标准化,降低异构系统集成复杂度。
###
ROS通过其开放的架构和活跃的生态,正系统性地构建从云端智能到本地运动控制的全栈支持能力。其中,灵活高效的数据处理与存储服务,如同智能机器人的“神经网络”与“记忆系统”,将抽象的智能算法与具体的物理执行紧密联结。随着相关技术的持续突破与融合,ROS必将在赋能机器人完成更复杂、更自主、更协同的任务中,发挥不可替代的基础平台作用,持续加速整个机器人产业的智能化变革进程。